대부분의 분산 서버 벤더들은 99.99999% 의 reliability 를 보장하지만, 100%는 아닙니다. 왜그럴까요? 그들이 못해서가 아니라 consensus 문제 때문입니다.
The fault lies in the impossibility of consensus
Consensus 문제가 중요한 이유는, 많은 분산 시스템이 consensus 문제이기 때문입니다.
- Perfect Failure Detection
- Leader Election
- Agreement (harder than consensus)
일반적으로 서버가 많으면 다음의 일들을 해야합니다.
- Reliable Multicast: Make sure that all of them receive the same updates in the same order as each other
- Membership/Failure Detection: To keep their own local lists where they know about each other, and when anyone leaves or fails, everyone is updated simultaneously
- Leader Election: Elect a leader among them, and let everyone in the group know about it
- Mutual Exclusion: To ensure mutually exclusive access to a critical resource like a file
이 문제들은 대부분 consensus 와 연관되어 있습니다. 더 직접적으로 연관되어 있는 문제들은
- The ordering of messages
- The up/down status of a suspected failed process
- Who the leader is
- Who has access to the critical resource
Consensus Problem
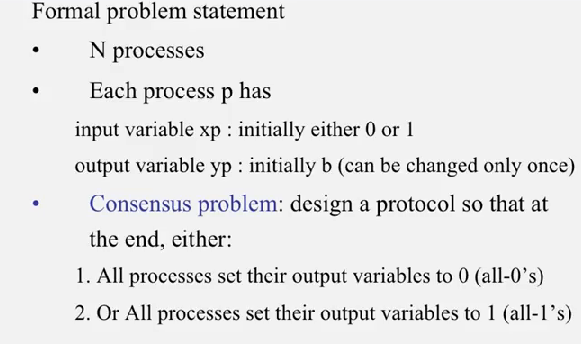
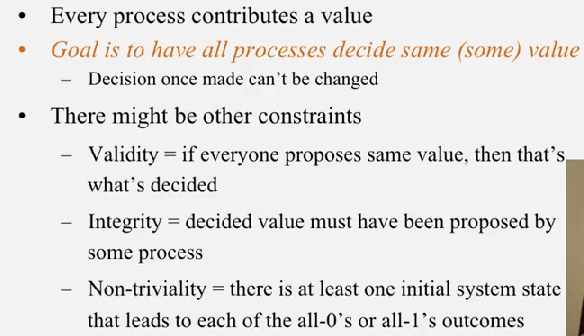
모든 프로세스(노드, 서버)가 같은 value 를 만들도록 해야 하는데, 몇 가지 제약조건이 있습니다.
- validity: if everyone propose same value, then that’s what’s decided
- integrity: decided value must have been proposed by some process
- non-triviality: there is at least one initial system state that leads to each of the all-
0’s or all-1’s outcomes
non-triviality 는 쉽게 말해서, 모두 0 이거나 모두 1 일 수 있는 상태가 있어야 한다는 뜻입니다. 왜냐하면 항상 0 이거나 1 만 나오면 trivial 하기 때문입니다. 별 의미가 없죠.
Models
consensus 문제는 분산 시스템 모델에 따라 달라집니다. 모델은 크게 2가지로 나눌 수 있는데
(1) Synchronous Distributed System Model
- Each message is received within bounded time
- Drift of each process’ local clock has a known bound
- Each step in a process takes
lb < time < ub
동기 시스템 모델에서는 consensus 문제를 풀 수 있습니다.
(2) Asynchronous Distributed System Model
- Nobounds on process execution
- The drift rate of a clock is arbitrary
- No bounds on message transmission delay
일반적으로 비동기 분산 시스템 모델이 더 일반적입니다, 그리고 더 어렵죠. 비동기를 위한 프로토콜은 동기 모델 위에서 작동할 수도 있으나, 그 역은 잘 성립하지 않습니다.
비동기 분산 시스템 모델에서는 consensus 문제는 풀 수 없습니다
- Whatever protocol/algorithm you suggest, there is always a worst-case possible execution with failures and message delays that prevens the system from reaching consensus
- Powerful result(see the FLP proof)
- Subsequently, safe and probabilistic solution have become popular (e.g Paxos)
Paxos in Syncronous Systems
동기 시스템이라 가정합니다. 따라서
- bounds on message dealy
- bounds on upper bound on clock drift rates
- bounds on max time for each process step
- processes can fail by stopping
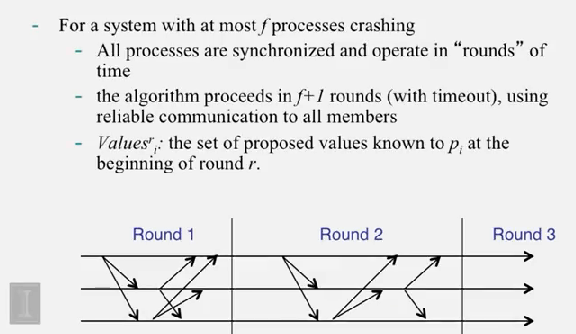
- 아무리 많아야
f개의 프로세서에서 crash 가 나고 - 모든 프로세서는 round 단위로 동기화 되고, 동작하며
- reliable communication 을 통해 서로 통신합니다
value_i^r 을 round r 의 시작에 P_i 에게 알려진 value 의 집합이라 라 하겠습니다.
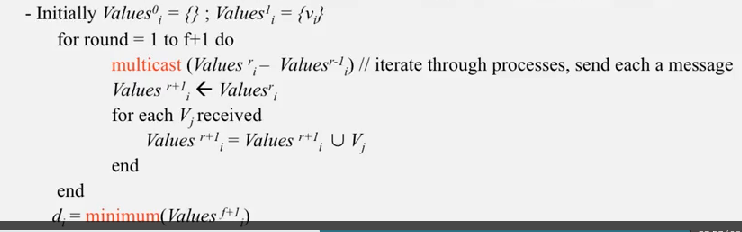
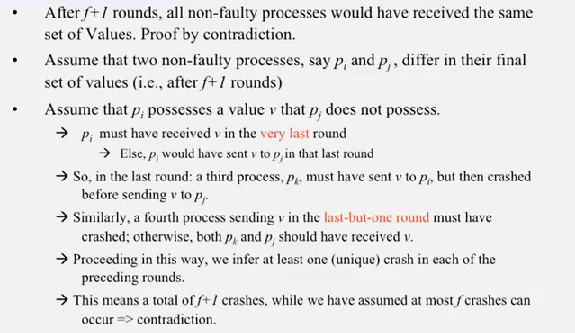
f+1 라운드 후에 모든 correct 프로세스는 같은 값의 집합을 가지게 되는데, 귀류법으로 쉽게 증명할 수 있습니다.
비동기 환경에서는, 아주아주아주아주아주 느린 프로세서와 failed 프로세서를 구분할 수 없기 때문에, 나머지 프로세서들이 이것을 결정하기 위해 영원히 기다려야 할지도 모릅니다. 이것이 기본적인 FLP Proof 의 아이디어입니다. 그렇다면, consensus 문제를 정말 풀기는 불가능한걸까요?
풀 수 있습니다. 널리 알려진 consensus-solving 알고리즘이 있습니다. 실제로는 불가능한 consensus 문제를 풀려는 것이 아니라, safety 와 eventual liveness 를 제공합니다. 야후의 zookeeper 나 구글의 chubby 등이 이 알고리즘을 이용합니다.
safety 는 서로 다른 두개의 프로세서가 다른 값을 제출하지 않는것을 보장하고, (No two non-faulty processes decide different values) eventual liveness 는 운이 좋다면 언젠가는 합의에 도달한다는 것을 말합니다. 근데 실제로는 꽤 빨리 consensus 문제를 풀 수 있습니다.
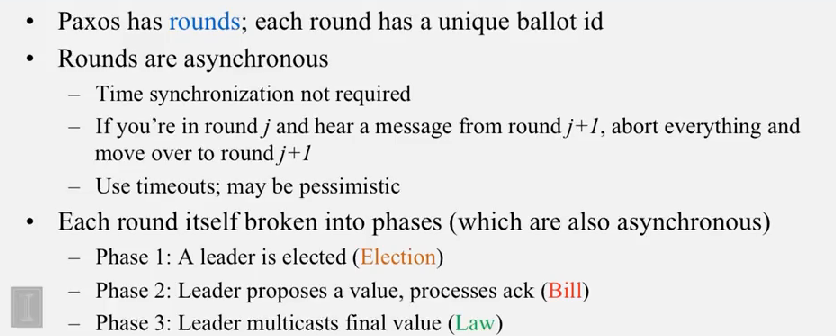
본래는 최적화때문에 더 복잡한데, 위 슬라이드에서는 간략화된 paxos 가 나와있습니다. paxos 의 round 마다 고유한 ballot id 가 할당되고, 각 round 는 크게 3개의 비동기적인 phase 로 분류할 수 있습니다.
- election: a leader is elected
- bill: leader proposes a value, processes ack
- law: leader multicasts final value
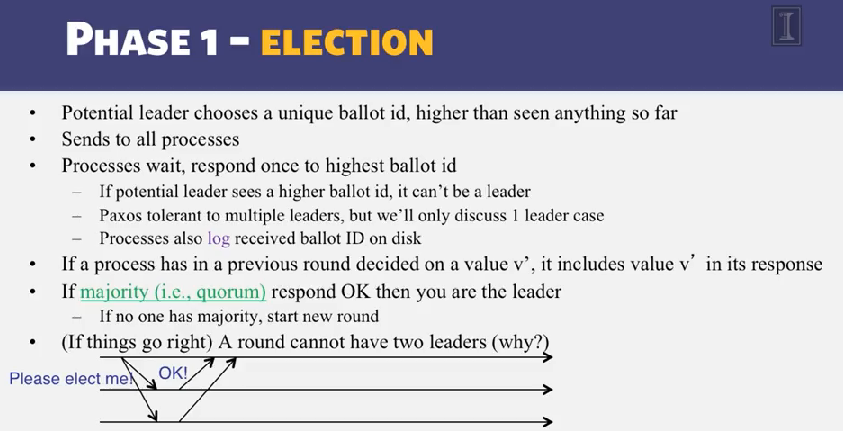
먼저 potential leader 가 unique ballot id 를 고르고, 다른 프로세서들에게 보냅니다. 다른 프로세스들의 반응에 의해서 선출될 수도 있고, 선출되지 않으면 새로운 라운드를 시작합니다.
- Because becoming a leader requires a majority of votes, and any two majorities intersect in at least one process, and each process can only vote once.
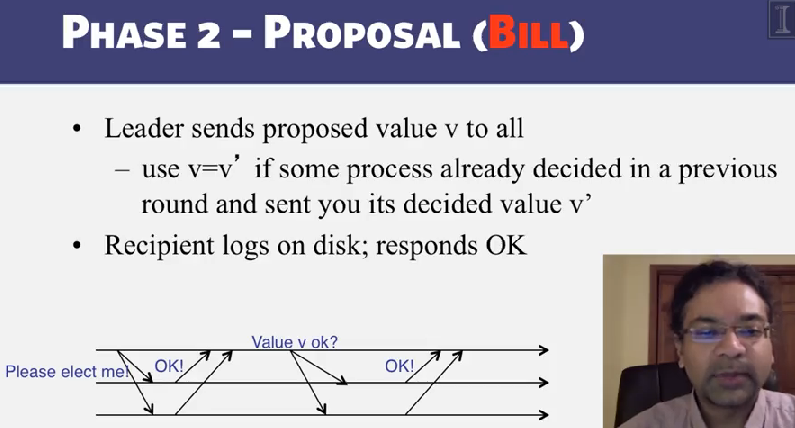
리더가 다른 프로세스들에게 v 를 제안하고, 프로세스들은 지난 라운드에 v' 를 결정했었으면 v=v' 를 이용해 값을 결정합니다.
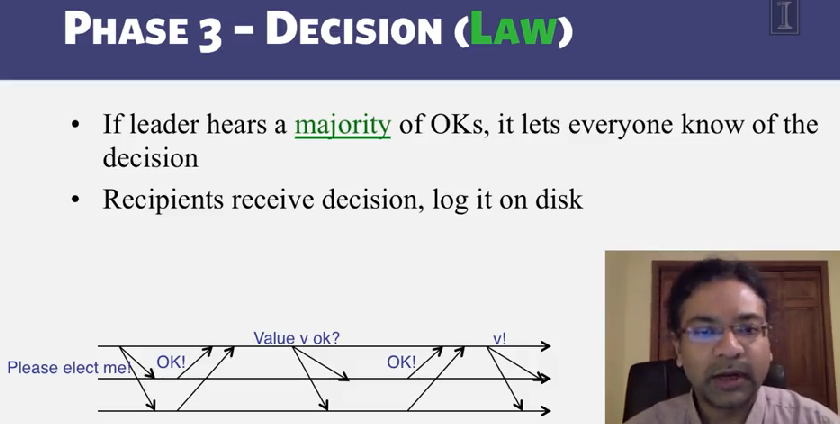
만약 리더가 majority 의 긍정적인 반응을 얻으면 모두에게 그 결정을 알리고 각 프로세서는 합의된 내용을 전달받고, 로그에 기록하게 됩니다.
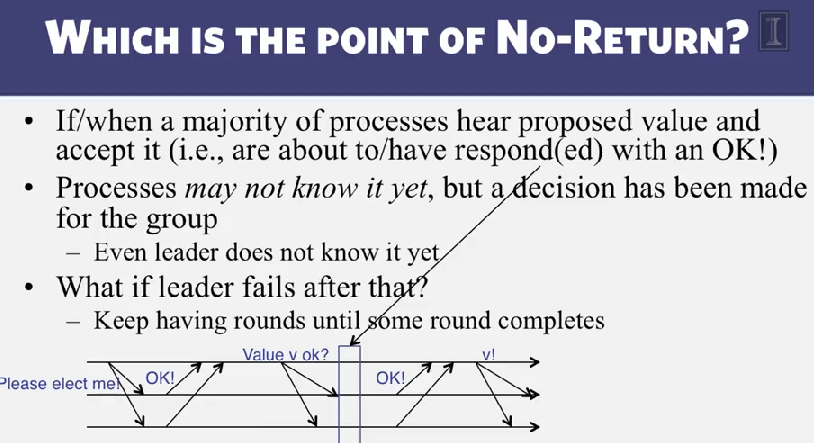
사실 이 과정은 응답을 리더가 받는 단계에서 결정되는 것이 아니라, 프로세서들이 proposed value 를 듣는순간 결정됩니다. 따라서 리더에서 failure 가 일어나도, 이전에 결정되었던 v' 을 이용할 수 있습니다.
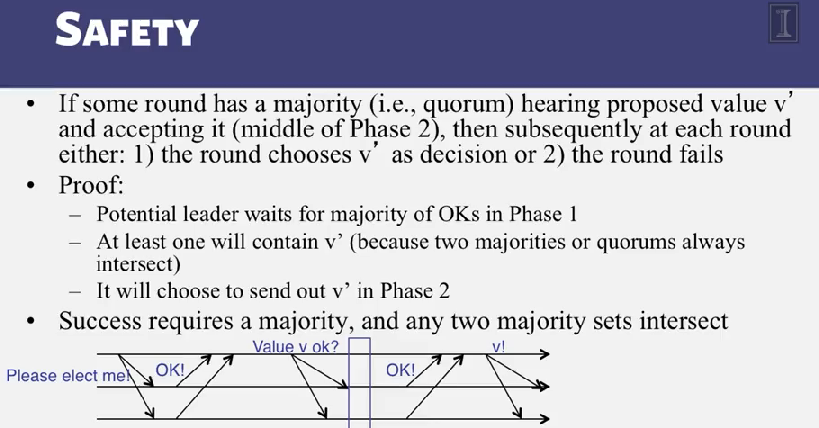
이전에도 언급했듯이 safety 는 두개의 서로 다른 프로세서의 의해서 다른 값이 선택되지 않음을 보장합니다. 이는 잠재적 리더가 있다 하더라도 현재 리더와, 잠재적 리더에게 응답하는 majority (반수 이상) 을 교차하면 적어도 하나는 v' 를 응답하기 때문에 bill phase 에서 정의한대로 이전 결과인 v' 가 사용됩니다.
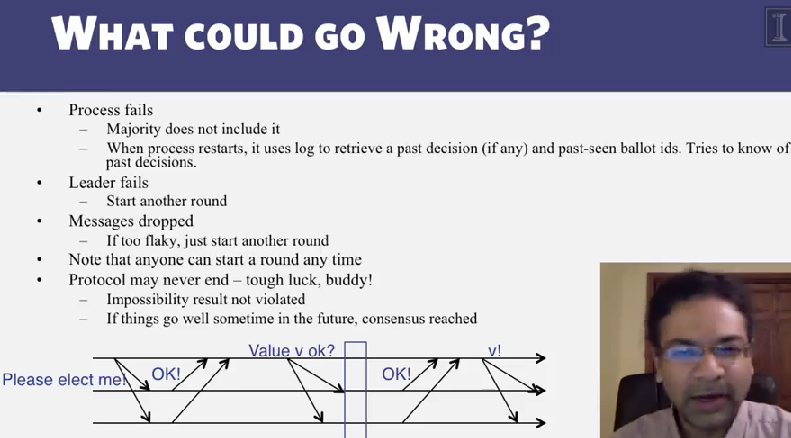
그림에서 볼 수 있듯이 영원히 끝나지 않을수도 있지만, 실제로는 꽤 빠른시간 내에 합의에 도달합니다. (eventualy-live in async systems)
Refs
(1) Title Image
(2) Cloud Computing Concept 1 by Indranil Gupta, Coursera
